


Напълно автоматизиран робот за почистване на слънчеви панели
Описание на продукта
Уникалният дизайн на скрит сензор за зрение против отблясъци гарантира, че роботът може да получава точно информация за позициониране дори в среда с силно замърсяване или ярка светлина, което позволява високопрецизно позициониране на фотоволтаичните модули.
Без никаква модификация на полето, собствената система за изкуствен интелект на робота може да постигне позициониране с точност до милиметър върху повърхността на модула. Без човешко наблюдение, той може да усеща, планира и взема решения автономно за перфектна автоматизация на почистването.
Преносимият робот за почистване на фотоволтаични системи има 6 основни характеристики на продукта:
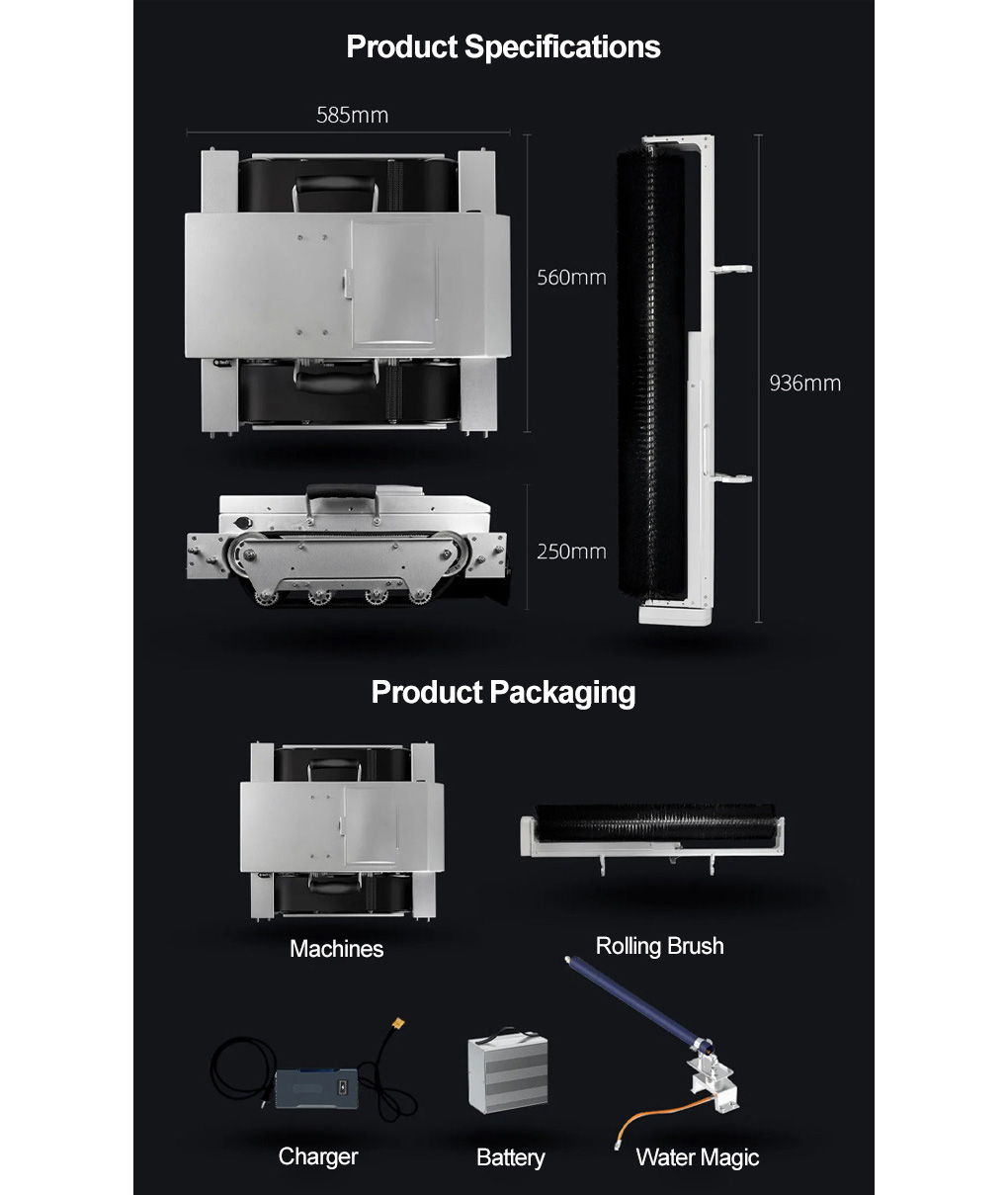
1. Батерията може да се смени и животът ѝ е безпроблемен.
Един робот, захранван от 2 литиеви батерии, може да осигури непрекъсната работа на цялата машина в продължение на 2 часа. Конструкция с щипка тип „куршум“ за бързо разглобяване, времето на издръжливост се удължава лесно.
2. Нощно почистване. Автоматично връщане с ниска мощност.
Почистващият робот може безопасно да извършва почистващи операции през нощта и да се връща в полет с ниска мощност, като се позиционира автономно. Денем не влияе на производството на енергия от електроцентралата, което значително подобрява ефективността на генериране на енергия от потребителя.
3、Лек и преносим панел 0 тежест
Иновативно използване на аерокосмически материали, лек дизайн на цялата машина, за да се избегне повреда от натъпкване на фотоволтаичния панел по време на процеса на почистване. Леката конструкция намалява тежестта на работа за потребителите и един човек може бързо да разположи и управлява десетки машини едновременно, спестявайки разходи за почистване и ефективно подобрявайки ефективността на работата.

4. Стартиране с един ключ, ротация, интелигентен път за планиране
Интелигентният робот може да се стартира с натискане на бутон. Специалният режим на въртящо се почистване е оборудван с интегрирани сензори, така че роботът може да засече ръба на решетката, автоматично да регулира ъгъла, независимо да изчисли оптималния и ефективен маршрут за почистване, осигурявайки цялостно покритие без пропускане.
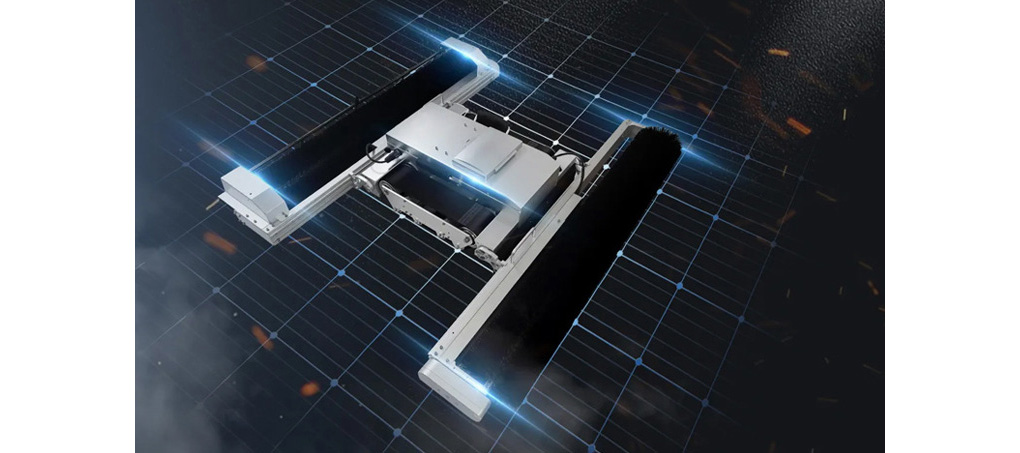
5, адсорбционно разпределено ходене, за да се адаптира към различни наклонени повърхности
Роботът се адсорбира плътно към повърхността на фотоволтаичните панели чрез подвижни вендузи, а шахматното разпределение на помощните вендузи му позволява да се движи по-стабилно по гладки склонове от 0-45°, адаптирайки се към различни сложни работни среди.
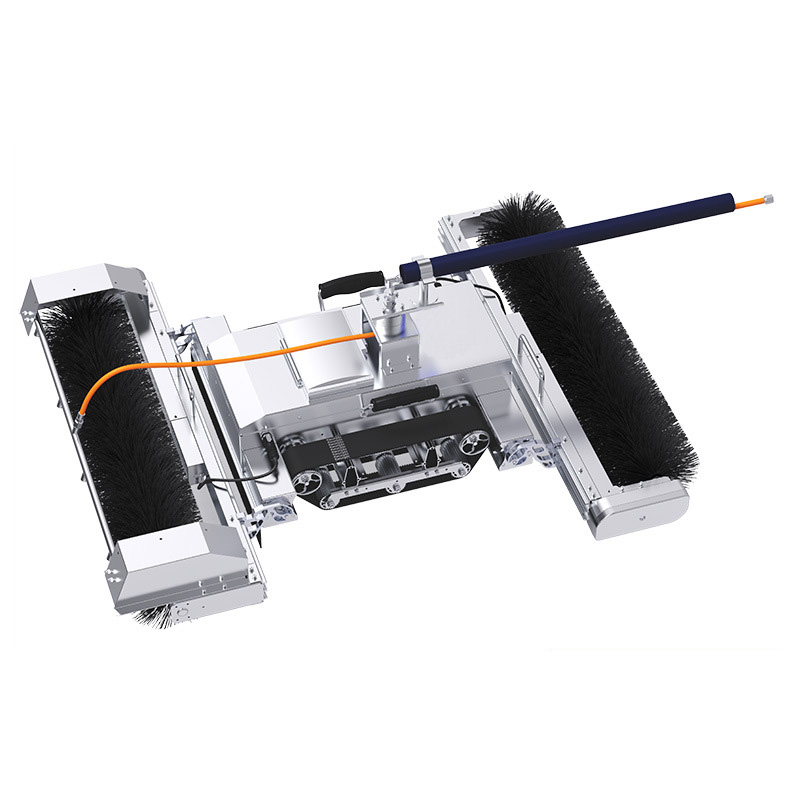
6. Турбокомпресорно нано безводно почистване, по-добро
Един почистващ агрегат е оборудван с две въртящи се в противоположни посоки нановлакнести ролкови четки, които могат да поемат адсорбираните по повърхността прахови частици и да ги събират, за да бъдат незабавно засмукани в прахоуловителя чрез центробежната сила на турбокомпресорния вентилатор. Не е необходимо да се повтаря същата зона, почистване без разход на вода, опазване на околната среда и пестене на енергия.



-

Телефон
-

Имейл
-

WhatsApp
-

Най-горе